LaTeX templates and examples — International Languages
Recent
Template para completar el formulario de solicitud de horas de cálculo al Sistema Nacional de Computación de Alto Desempeño.
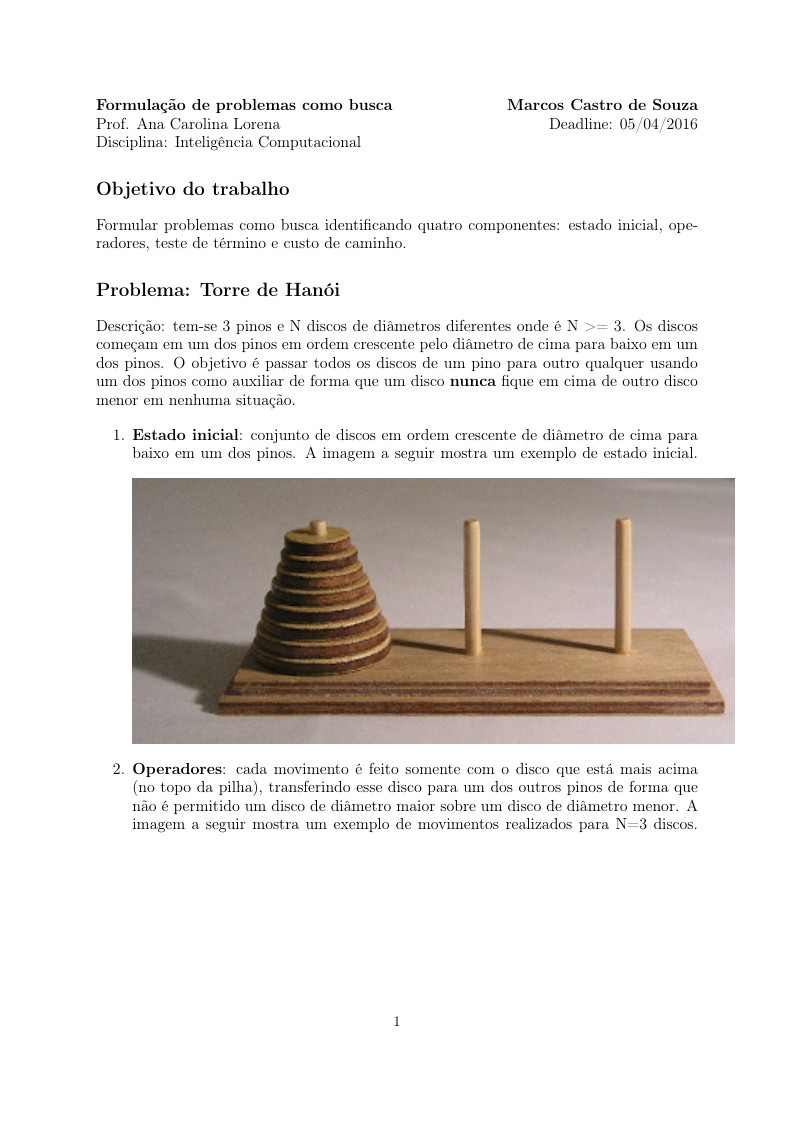
Esse trabalho tem como objetivo formular problemas como busca.
山中 卓 (KEK、元大阪大学)が作成された科研費LaTeXを、坂東 慶太 (名古屋学院大学) が了承を得てテンプレート登録しています。 詳細はこちら↓をご確認ください。 http://osksn2.hep.sci.osaka-u.ac.jp/~taku/kakenhiLaTeX/

Modelo para TCC, dissertações ou teses seguindo as normas do manual da UFVJM - Universidade dos Vales do Jequitinhonha e Mucuri

Résolution de problème inverse par point fixe
Série de Estudos Bíblicos sobre as Parábolas proferidas por Jesus Cristo
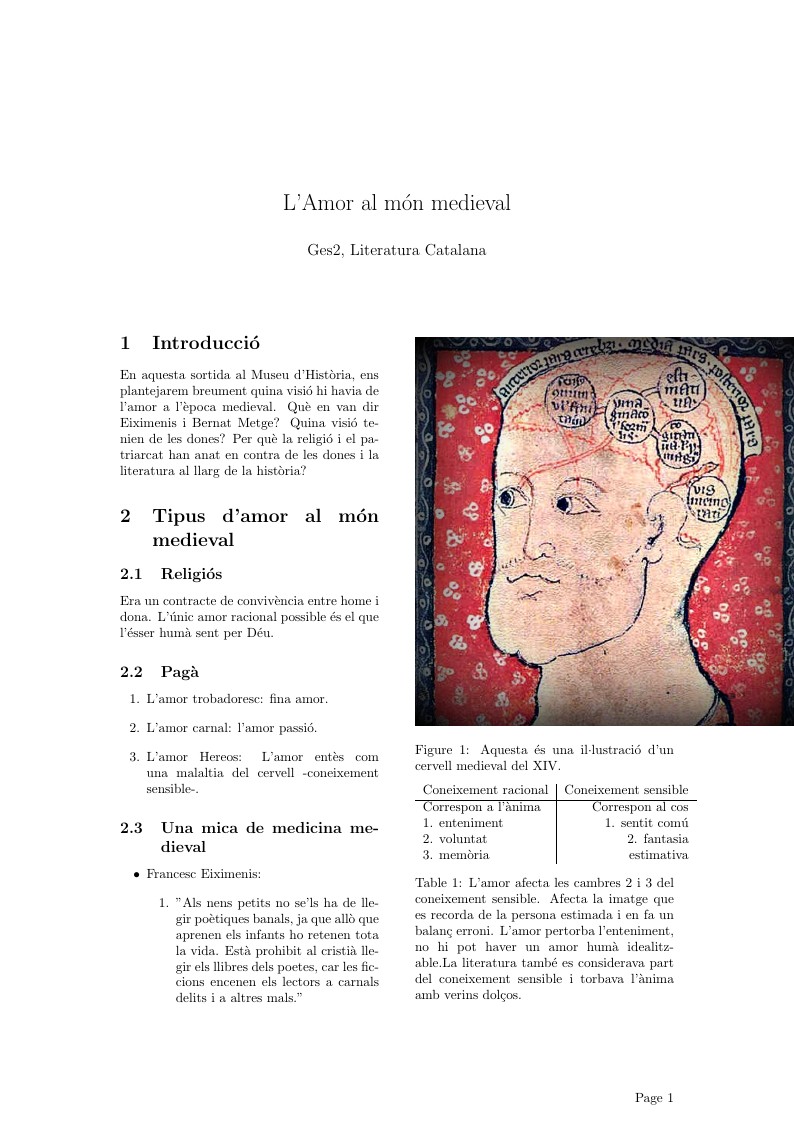
Breu resum sobre l'amor al món medieval. Basat en apunts de l'assignatura de la UB.
Template utilizado para os relatórios dos laboratórios de OAC. Pode ser que seja utilizado em outras disciplinas lecionada pelo professor
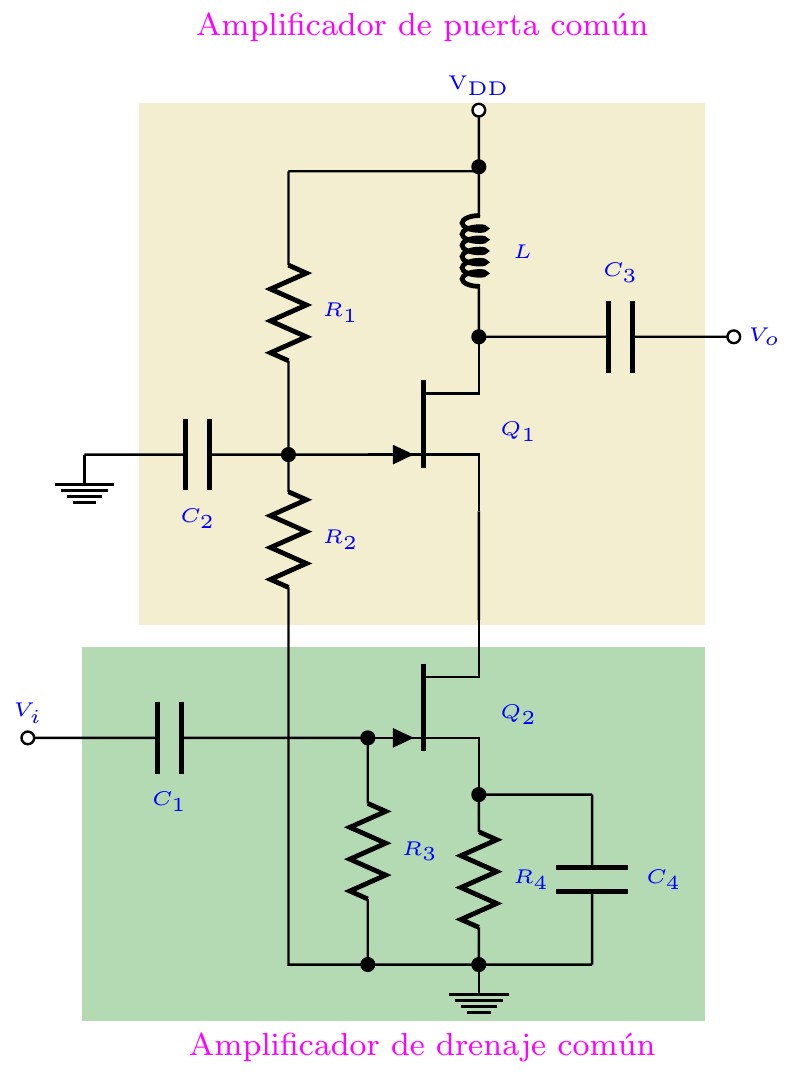
Este ejemplo representa un amplificador cascodo construido con transistores JFET (Transistores de Efecto Campo de unión) en dos etapas diferentes: amplificador de compuerta (o puerta) común y amplificador de drenaje común. La imagen está destinada a ser un archivo .svg de tipo transparente. La opción x11names sirve para usar colores específicos del paquete "xcolor" para trazar fondos de color en determinados puntos de la imagen. El paquete circuitikz es utilizado para trazar los diferentes símbolos de elementos circuitales, mientras que se usa la biblioteca "backgrounds" para hacer uso de fondos para la imagen. Las notaciones son las siguientes: Vi = tensión de entrada. Vo = tensión de salida. VDD= polarización positiva en el terminal de drenaje. Todos los componentes eléctricos y electrónicos carecen de valores o tipos. Este esquema es una adaptación del que se encuentra en la página 71, Capítulo 9 del texto "Electronic Devices (Electron Flow Version)" de Thomas L. Floyd, publicado en el año 2012, en idioma inglés, por la editorial estadounidense Prentice Hall.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.