Community articles — Reports
Write up experiments and research with LaTeX templates for project and lab reports—including layout guidelines to help guide you through the writing process.
Recent

This is a review of journals in the area of using Artificial Intelligence for Intrusion Detection and Prevention Systems. The journals have discussed the milestones that have been achieved in the area of network security particularly intrusion detection. They has also highlighted several Machine Learning algorithms that can be applied in this area to improve the IDS systems.

Final Project of the course named Scientific Researching Method. Our project was about emotional recognition
Energy consumption is one of the most critical issues in the manufacturing industry. The modeling, analysis and improvement of energy cost and consumption in multistage production system have been widely studied in many research works. To summarize the latest development of research of energy consumption, a large amount of research work have been investigated. The review work includes effect of design for the energy consumption and interactions between many aspects related to industry. This research research combines energy systems from microscopic to macroscopic, which includes machine, manufacturing line and factory level. This document begins with a review of energy consumption on machine level. Including the schema for machine states and transition of energy, the process model for energy analysis and improvement methods. These topics are further discussed in detail for different processes, eg. forming process, additive processes, etc. In the next part of the review the researches on energy consumption for the multi-machine/manufacturing line level are introduced. Include the define of manufacturing line level, the logical benchmarking of manufacturing lines, and the utilization of energy flows. At last, the detailed way for the factory level energy management are studied. Including the factory energy management system and the method of reduce energy consumption.

Com a evolução constante da eletrônica, a necessidade de produzir protótipos em placa de circuito impresso é cada vez mais cobrada e importante para se elaborar tecnologia de forma rápida, mas sem deixar a qualidade de produção baixa. Pensando nisso, este artigo propõe o desenvolvimento de uma fresadora CNC com base no comando numérico computadorizado para a confecção de trilhas na placa de circuito impresso de forma otimizada. Deste modo, são mostrados passo a passo os pilares teóricos que compõem a base de conhecimento para que se possa entender e desenvolver a ferramenta que irá usinar e por sua vez produzir o protótipo de forma eficaz. Os resultados obtidos em relação à montagem da ferramenta e o material usinado foi classificado com satisfatório, já que a máquina CNC conseguiu atingir seus objetivos, perfurando, cortando a placa e isolando as trilhas formando assim o circuito.
Gesture controlled robot is a robot which can be controlled by simple gesture. The user just needs to wear a gesture device which include a sensor. The sensor will record the movement of hand in a specific direction which will result in the movement of the robot in the respective direction. The robot and the gesture device are connected wirelessly via radio waves. The wireless communication enables the user to interact with the robot in a more friendly way.
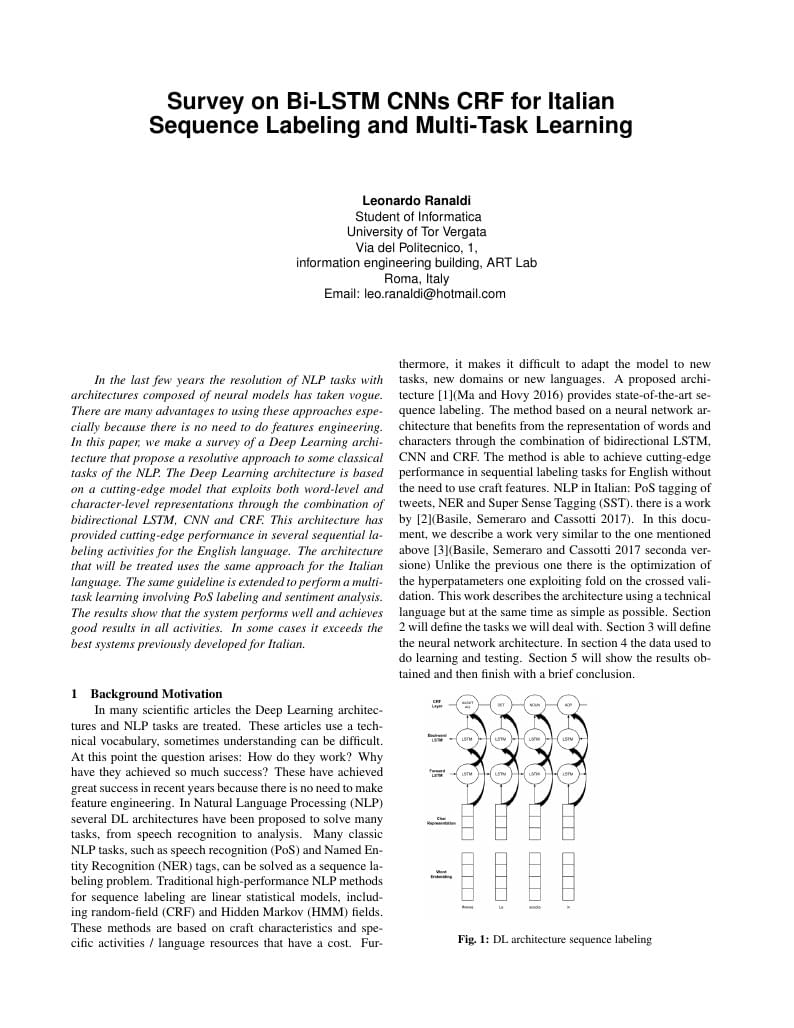
In the last few years the resolution of NLP tasks with architectures composed of neural models has taken vogue. There are many advantages to using these approaches especially because there is no need to do features engineering. In this paper, we make a survey of a Deep Learning architecture that propose a resolutive approach to some classical tasks of the NLP. The Deep Learning architecture is based on a cutting-edge model that exploits both word-level and character-level representations through the combination of bidirectional LSTM, CNN and CRF. This architecture has provided cutting-edge performance in several sequential labeling activities for the English language. The architecture that will be treated uses the same approach for the Italian language. The same guideline is extended to perform a multi-task learning involving PoS labeling and sentiment analysis. The results show that the system performs well and achieves good results in all activities. In some cases it exceeds the best systems previously developed for Italian.

This study is focused on lives of twelve women who prepared their doctorates in mathematics at the Faculty of Philosophy of the German University in Prague in the years 1882–1945, respectively at the Faculty of Science of the Czech University in Prague in the years 1882–1920 and 1921–1945 (known as Charles University in Prague in the latter period). In the first part, a short description of the historical background about women's studies at the universities in the Czech lands and a statistical overview of all PhD degrees in mathematics awarded at both universities in Prague is given for a better understanding of the situation with women's doctoral procedures. In the second part, a description of the successful doctoral procedures in mathematics of three women at the German University in Prague and of eight women at Charles University in Prague, as well as one unsuccessful doctoral procedure, are presented.
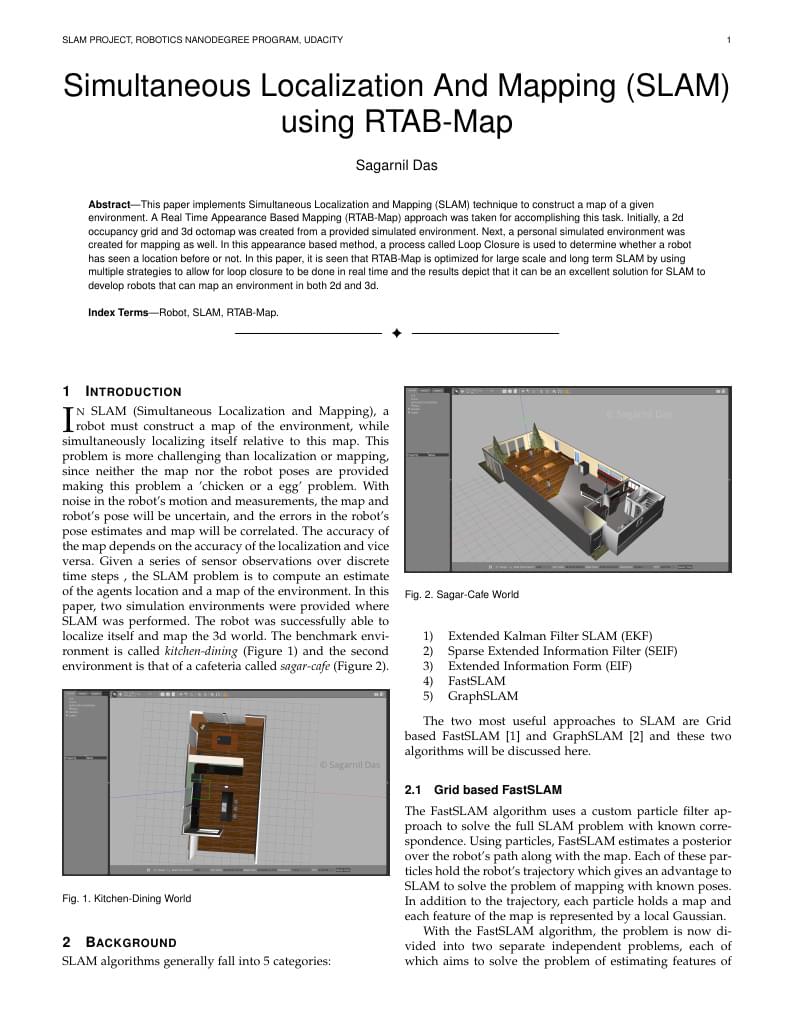
This paper implements Simultaneous Localization and Mapping (SLAM) technique to construct a map of a given environment. A Real Time Appearance Based Mapping (RTAB-Map) approach was taken for accomplishing this task. Initially, a 2d occupancy grid and 3d octomap was created from a provided simulated environment. Next, a personal simulated environment was created for mapping as well. In this appearance based method, a process called Loop Closure is used to determine whether a robot has seen a location before or not. In this paper, it is seen that RTAB-Map is optimized for large scale and long term SLAM by using multiple strategies to allow for loop closure to be done in real time and the results depict that it can be an excellent solution for SLAM to develop robots that can map an environment in both 2d and 3d.
We study Logarithmically Spiral Trajectories and, in particular, we look for a solution to minimize the transit time of a Spacecraft propelled by a Solar Sail, while simultaneously minimizing the area of the Solar Sail, which would allow us to carry more payload on board. We start by analyzing the forces that act on the Spacecraft taking into account that its propellant is a Solar Sail; we use the studied forces to deduce the motion equations. We then solve this motion equation with a Runge-Kutta 4 method and transform the problem of minimizing time and area to a Non-linear Optimization problem. When solving the NLP we also try to minimize the relative final speed of th spacecraft with the destination planet in order to guarantee the possibility of a safe landing on its surface. The model improves when an angle parameter α (describing the angle formed by the Solar Sail with the colliding photons) is defined as a piecewise constant function and optimized whose values are optimized in every interval to minimize transit time and Area. Using the developed model to optimize the trajectory to be followed for sending from Earth to Mars a 2000kg-spacecraft propelled by a Solar Sail, subject to the condition that at trajectory start Mars and Earth were at their closest approach, and the Arrival Relative Velocity is less than 9km/s, give us a minimal transit time of 500days and a minimal area for the Solar Sail of 183158m2, meaning that the maximal payload would be 718kg. Compared with different number of partitions of α, the optimum stays stable. This gives a solid optimal trajectory and a great result for the numerical method used. Actually, waiting until the best moment to throw the Spacecraft, id est, Mars is at 1.14 radians respectively to Earth initial position, the minimal sail area 145950 m2 and, therefore, ables to transport until 978 kg of payload with the same transit time. In addition and to conclude we tried the model to optimize the inverse trajectory.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.