overleaf template galleryLaTeX templates and examples — Recent
Discover LaTeX templates and examples to help with everything from writing a journal article to using a specific LaTeX package.

Grade 10 Research :)

SAFE LaTeX: LaTeX Templates for SAFE (Simple Agreement for Future Equity) Term Sheets. Paul Graham and yCombinator have recently created and publicly recommended the usage of SAFEs over convertible debt notes. More information about SAFEs can be found here: http://ycombinator.com/safe/. This project aims to make the process of making term sheets for your startup easier. Creating these documents through LaTeX makes it much easier to create professional looking PDFs and only requires modification of a single file. This file can also be generated through a script to allow users to create multiple documents from a list of investors.

Write a short summary of the third assignment here. In the summary include the question you answered, a few sentences to describe the nature of the problem. The problem statement or introduction should introduce the health issue that you are answering and what is known about the health problem. Also indicate why answering the question is important. Then write a few sentences about what databases you searched, and what were you search criteria (you should describe that in words, do not include any tables or figure here). Then write the results you obtained. Here, write briefly how many articles you originally retrieved and how many articles (five, but if not five then how many) articles you finally considered to be good enough to answer the question and which article you found best out of these five and why. Then briefly describe the nature of the article and write a few sentences as to why and how this article answered the main question you set out to answer in this assignment. Typically the summary will be one paragraph, but you can include more than one paragraph to break up the thoughts and ideas presented in your assignment. Try to be brief and capture the essential point in the assignment you write. Do not include any references or citations in this section.
Group Isomorphisms
A template in Swedish for a Bachelor Thesis at the Division of Statistics and Machine Learning at Linköping University.
This picture shows jin jang.

A simple initial exercise to get students started with LaTeX and Overleaf.
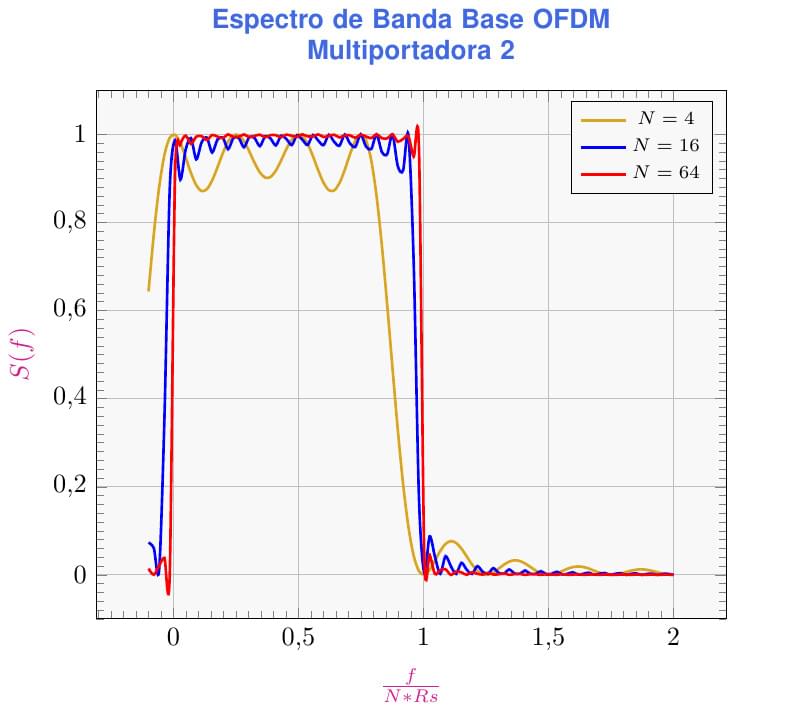
Esta gráfica es la segunda versión del ejemplo titulado "Espectro de Banda Base OFDM Multiportadora" https://www.overleaf.com/latex/examples/espectro-de-banda-base-ofdm-multiportadora/xhbwfnpmmhpy. A diferencia del ejemplo previamente publicado por mí, en este caso se usó la opción gnuplot [raw gnuplot] de la orden \addplot. Al comparar ambos ejemplos, se observan algunas diferencias, probablemente por la forma en que se calculan las coordenadas en el paquete PGFPLOTS y la opción GNUPLOT que usa órdenes del paquete homónimo. Para el trazado de las 3 curvas se usa la orden \foreach y dentro del bucle, la orden \addplot+ con las opciones adecuadas para que las curvas aparezcan en colores diferentes. Otras opciones usadas se explican por sí mismas en los comentarios.
Beamer presentation template of Federal Institute of Santa Catarina, Brazil. This template was originally published on ShareLaTeX and subsequently moved to Overleaf in December 2019.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.